![]()
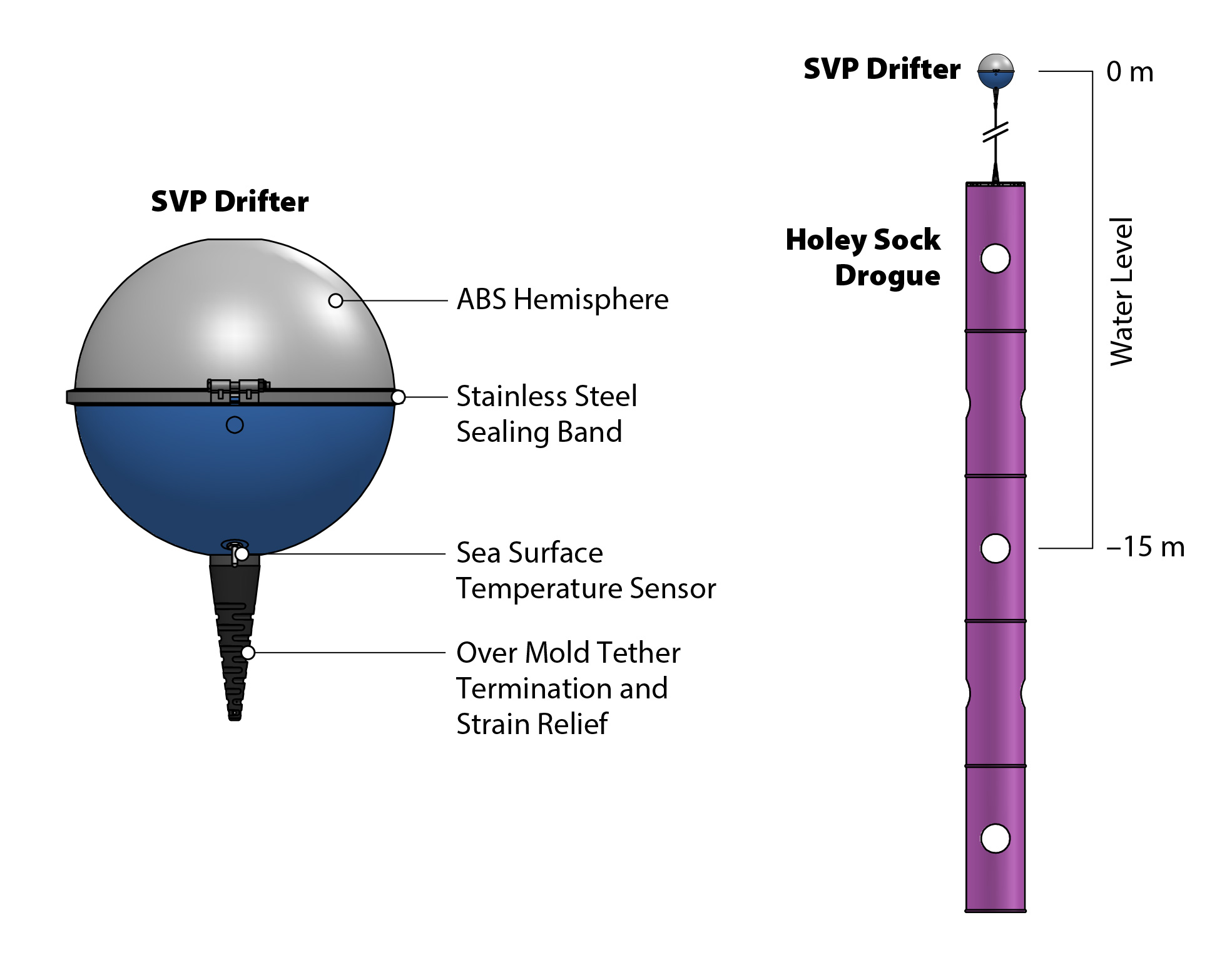
Surface Velocity Program (SVP) Drifter
Technical Description
- 35 cm sphere surface float
- GPS-based tracking
- Iridium Short Burst Data (SBD) telemetry
- Sea surface temperature (±0.05 K accuracy)
- Holey sock drogue centered at 15 m depth
- Variable sampling rate down to 5 minutes
- Two-year lifespan
> Download technical illustration (321 KB pdf)
Hardware
The SVP drifter’s hull has a diameter of 35 cm and is made of acrylonitrile butadiene styrene (ABS). The drogue is a cylindrical tube of rip-stop fabric nylon connected to the surface buoy with an impregnated steel wire-rope tether. A thermistor potted with thermally conductive resin encapsulated into a stainless-steel enclosure is mounted in the bottom part of the surface buoy, 18 cm below the flotation line. The base of the thermistor enclosure that communicates with the inside of the drifter is thermally insulated from the inside of the buoy with a special resin to avoid biased sea surface temperature (SST) readings that may occur when the drifter’s hull overheats under the sun, especially at low latitudes. The bench-accuracy of the SST measurements is ±0.05°C after five-point bath calibration across the sensing range of the thermistor (–5°C to 40°C).
Electronics
An LDL designed digital controller handles the duty cycle of the data collection (typically once per hour, but it can be changed underway using the two-way Iridium communication) and formats the data (SST and position) for satellite transmission. A comprehensive set of diagnostic data that are crucial to monitoring the health of the drifter array, such as the battery voltage, the hull’s internal pressure, temperature, and humidity, are also formatted and appended to the data message.
Telemetry
All drifters carry a satellite modem for data telemetry. The Argos satellite system has been used in the past to transmit the data to shore and to compute the drifter position using the Doppler shift of the transmitter carrier frequency, yielding a geolocation accuracy that ranges from ~200 m to ~2 km (Lopez et al., 2014).
In 2016, the GDP began transitioning to the the Iridium satellite system. The main advantages of Iridium telemetry are that the data are received by the drifters’ operators in a shorter time (typically 1 minute compared to 90–120 minutes with Argos), and the positions are measured with a Global Positioning System (GPS) engine that yields typical geolocation accuracy of 2–50 m (rms).
Batteries
The GDP drifters are fitted with diode-protected, alkaline D-Cell, 12 V, 56 Ah battery packs. Although alkaline D cells are not designed to withstand shocks and vibrations, they are preferred because they are less hazardous than primary lithium batteries. Since the target lifetime of the drifter is in excess of 400 days, it means that through its life the surface buoy undergoes several million impacts resulting from surface waves with mean periods ranging from ~3 s for wind waves to ~20 s for swell (Kinsman, 1984).
Drogue
The presence of the drogue is detected with a strain gauge mounted inside the hull and near the tether attachment. The strain gauge senses the deformation of the hull due to the pull of the tether, that is enhanced when a drogue is attached and surface waves interact with the drifter’s hull.
References
Kinsman, B. 1984. Wind Waves: Their Generation and Propagation on the Ocean Surface. Dover Publications, 704 pp.
Lopez, R., J.P. Malarde, F. Royer and P. Gaspar. 2014. Improving Argos Doppler location using multiple-model Kalman filtering. IEEE Transactions on Geoscience and Remote Sensing 52(8):4,744–4,755, https://doi.org/10.1109/TGRS.2013.2284293.